Though it can at times be overwhelming, one of my favorite things about working on a complex project is the vast number of things – some small, some large – that one has to learn to make it all work. For this phase of the project, we procured a plant stress camera, which is destined for the ArduPlane and perhaps the quadcopters as well.
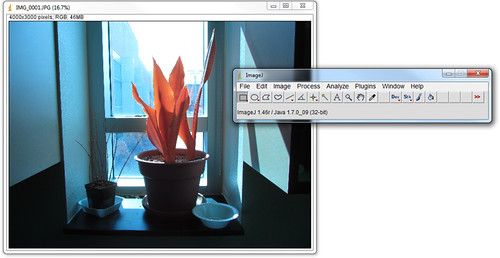
The camera – a Canon SX230 HS modified by LDP LLC/MaxMax.com – arrived recently, and I fired it up today to take some pictures of plants. I’ve also been reading up on ImageJ, a public domain, Java-based image processing program developed by the National Institutes of Health here in these United States. I don’t know much about it yet, but the software is extensible via plugins and macros, and the vendor provided various macros to convert RGB images into color scaled Enhanced Normalized Difference Vegetation Index images, or ENDVI.
The camera also needs to be updated with the Canon Hack Development Kit (CHDK), custom firmware that enables, among other things timed, continuous shooting, which is critical for our purposes. I’ll be updating the camera with that just as soon as I can read up on it. Onward!