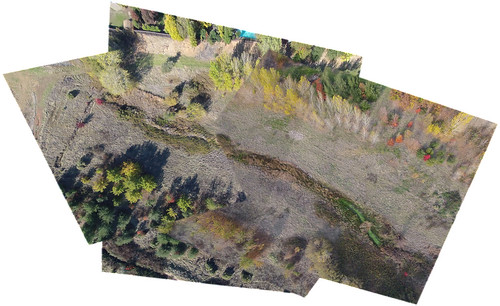
Having captured a few good aerial images, I turned them over to Jason Pittman, Professor of Geosciences and project co-conspirator. He georeferenced one of those images using ESRI ArcMap 10.1 – screen grab and details below.

Here is a photo (captured last week by the copter) that has been georeferenced to a Google Earth Image of the same area. Obvious advantage to our remote sensing data is the higher resolution imagery. Photo is kind of wonky since I referenced it using optical cues to determine matching points in each image. The coarse resolution of the GE image makes it difficult to line up with much precision.
The Google Earth image was georeferenced using known geographic coordinates (latitude and longitude) for the reference locations instead of relying on visual interpretation. This is a little faster and more precise. Once we get the aerial targets we can GPS in those locations (using the more accurate Trimble GPS) and we will have known points with geographic coordinates. Note the distortion on the north side of the image. This is an uncorrected version of the photo and the “fisheye” effect is apparent. The corrected mosaic you made is rad and will be a valuable step to add to our processing. Cool thing now is that since it is georeferenced we can start over-laying existing data sets (roads, campus CAD maps, cross country trail vector file etc.).
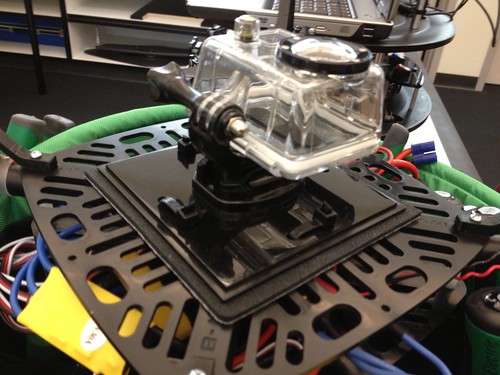
Jason mentions the GoPro’s fisheye distortion, which is rather pronounced, and I’ve been working on correcting that. There are many tutorials on YouTube detailing different methods of accomplishing the fix, though many of them rely on expensive, proprietary software – chiefly Adobe After Effects and Photoshop. I’m still hunting for an open source or web-based way to do this, but since I have access to Adobe’s tools, I tried a few techniques, including processing the images using After Effects and the “cc lens” filter mentioned here, which seemed to do the trick, though some data is lost out at the edges of the photo. In the next phase of the project, we’ll be using a different camera – likely a Canon PowerShot SX230 HS with CHDK installed – which should hopefully provide images with less distortion.
Jason also mentions aerial targets. These are typically made from stitched 4 mil PVC, and feature corner grommets used to secure them temporarily to the ground. They’re available from a variety of mapping supply companies and feature a few different patterns:

It seems like it would be simple enough to fabricate these DIY using foam core, so I’ll give that a shot, since we can’t fly anyway given the nonstop rain of late.
Update: Here’s the Illustrator version of the aerial targets image, in case you want to print your own.