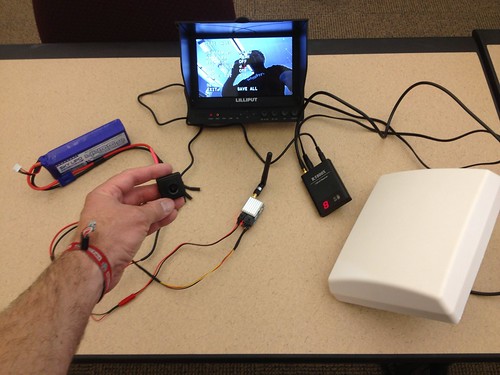
Spent some time in the workshop today in between meetings, and finally got the POV camera powered up and working. I fashioned a little custom wiring harness using JST connectors for power, reconfigured the A/V cable that came with the transmitter, and powered up the system. Behold – video! From left to right: LiPo battery (in this case powering Tx and Rx), camera, battery powered field monitor, transmitter (this and the camera will be housed on the quadcopter), receiver, and antenna.
In other news, the HoverFly Pro (a version of the flight control board that has some useful features, including auto level) arrived as well, so I’m working on upgrading the quadcopter with that and the POV video system. I hope to be flying again – and exploring local lakes with the OpenROV – in the next couple of weeks!